Deep Q Network With PyTorch in Cart Pole Environment
[70]:
import gymnasium as gym
from rlforge.experiments import ExperimentRunner
from rlforge.agents.semi_gradient import DQNTorchAgent
[71]:
num_envs = 8
envs = gym.make_vec("CartPole-v1", num_envs=num_envs, vectorization_mode="async")
agent = DQNTorchAgent(
state_dim=envs.observation_space.shape[1],
action_dim=envs.action_space[0].n,
network_architecture=(64,64),
learning_rate=0.0003,
discount=0.99,
temperature=0.1,
target_network_update_steps=10,
num_replay=4,
experience_buffer_size=50000,
mini_batch_size=512,
device="cpu"
)
[72]:
runner = ExperimentRunner(envs, agent)
results = runner.run_episodic_batch(
num_runs=1,
num_episodes=500,
max_steps_per_episode=None
)
rewards = results["rewards"]
runner.summary(last_n=20)
Run 1/1 - Episodes: 0%| | 0/500 [00:00<?, ?it/s]
============================================================
Experiment Summary (Episodic)
============================================================
Runs: 1
Average runtime per run: 452.095 seconds
Episodes per run (Max): 500
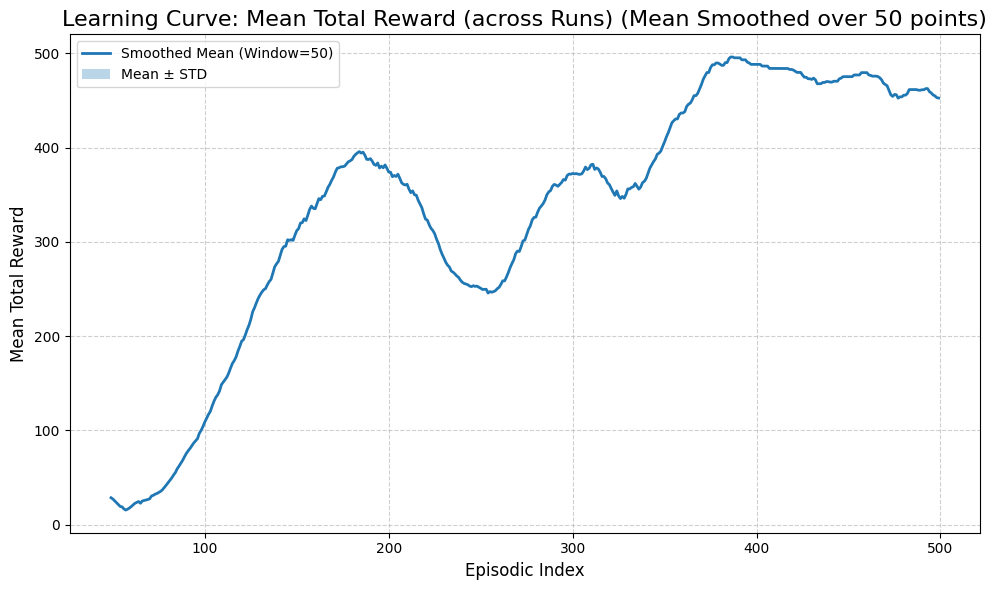
First episode mean reward: 77.000
Last episode mean reward: 479.000
Overall mean reward: 325.980
Mean reward (last 20 episodes): 473.250
First episode mean steps: 77.0
Last episode mean steps: 480.0
Overall mean steps: 327.0
============================================================
[74]:
runner.plot_results()