PPO Discrete in Cart Pole Environment
[1]:
import gymnasium as gym
from rlforge.agents.policy_gradient import PPODiscrete
from rlforge.experiments import ExperimentRunner
[2]:
num_envs = 8
envs = gym.make_vec("CartPole-v1", num_envs=num_envs, vectorization_mode="async")
agent = PPODiscrete(
state_dim=envs.observation_space.shape[1],
num_actions=envs.action_space[0].n,
actor_lr=0.0003,
critic_lr=0.002,
discount=0.99,
clip_epsilon=0.2,
network_architecture=[64,64],
update_epochs=10,
mini_batch_size=64,
rollout_length=1024,
value_coef=0.5,
entropy_coeff=0.01,
gae_lambda=0.95,
device='cpu'
)
[3]:
runner = ExperimentRunner(envs, agent)
results = runner.run_episodic_batch(
num_runs=5,
num_episodes=500,
max_steps_per_episode=None
)
rewards = results["rewards"]
runner.summary(last_n=20)
============================================================
Experiment Summary (Episodic)
============================================================
Runs: 5
Average runtime per run: 95.912 seconds
Episodes per run (Max): 500
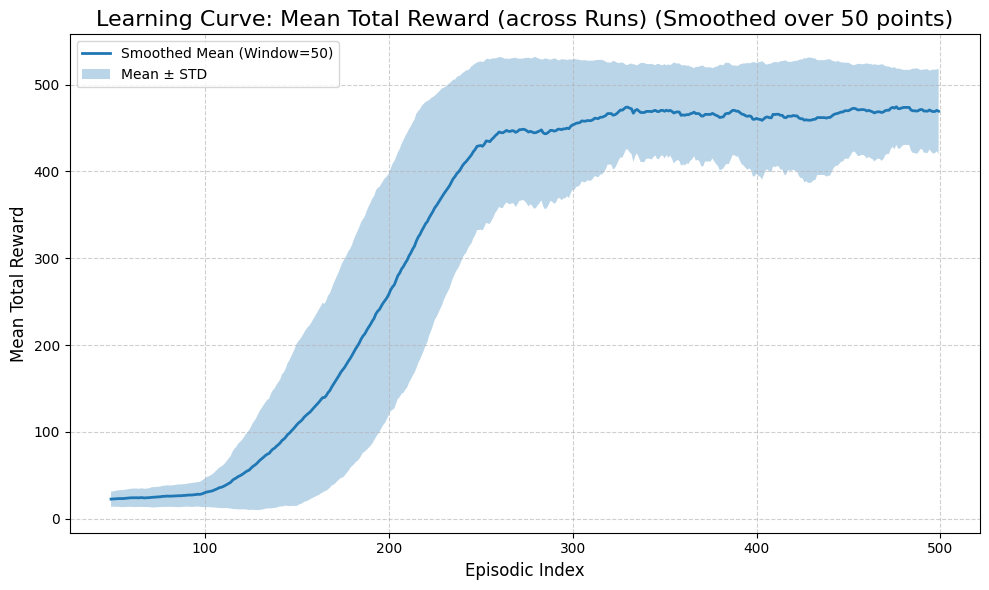
First episode mean reward: 14.400
Last episode mean reward: 450.200
Overall mean reward: 316.242
Mean reward (last 20 episodes): 472.030
First episode mean steps: 14.4
Last episode mean steps: 451.2
Overall mean steps: 317.2
============================================================
[4]:
runner.plot_results()