TD3 Pendulum
[5]:
import gymnasium as gym
from rlforge.agents.policy_gradient import TD3Agent
from rlforge.experiments import ExperimentRunner
[6]:
num_envs = 8
envs = gym.make_vec("Pendulum-v1", num_envs=num_envs, vectorization_mode="async")
agent = TD3Agent(
state_dim=envs.observation_space.shape[1],
action_dim=envs.action_space.shape[1],
policy_net_architecture=(64, 64),
q_net_architecture=(64, 64),
actor_lr=3e-3,
critic_lr=3e-3,
discount=0.99,
tau=0.005,
update_frequency=10,
buffer_size=1000000,
mini_batch_size=256,
update_start_size=256,
action_low=envs.action_space.low[0],
action_high=envs.action_space.high[0],
noise_std=0.1,
policy_delay=2,
target_noise_std=0.2,
target_noise_clip=0.5,
device="cpu"
)
[7]:
runner = ExperimentRunner(envs, agent)
results = runner.run_episodic_batch(
num_runs=5,
num_episodes=1500,
max_steps_per_episode=None
)
rewards = results["rewards"]
runner.summary(last_n=20)
============================================================
Experiment Summary (Episodic)
============================================================
Runs: 5
Average runtime per run: 85.249 seconds
Episodes per run (Max): 1500
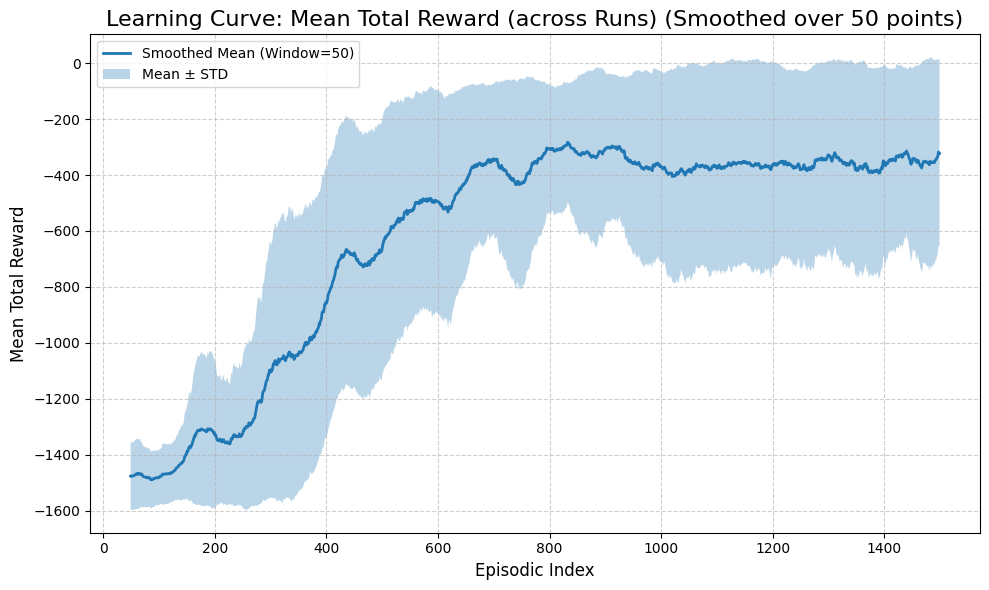
First episode mean reward: -1559.873
Last episode mean reward: -190.111
Overall mean reward: -627.724
Mean reward (last 20 episodes): -296.751
First episode mean steps: 200.0
Last episode mean steps: 201.0
Overall mean steps: 201.0
============================================================
[8]:
runner.plot_results()